Lynx is a high-tech company focusing on delivering Mixed Reality headsets for AR & VR. We develop hardware for a living, but our software team is bigger than the hardware team as we have to take care of our AOSP-based OS running on Lynx-R1, firmware, drivers etc to enable an OpenXR compatible runtime.
One of our core principles is to be as open as possible and give back to the AR/VR community. Today, we are proud to release our work around 6DoF, a multiple-years effort. 6DoF, or SLAM, is one the core perception features needed for immersive AR/VR. It enables the headset to understand the user’s movements and give the ability for 3D virtual objects to appear fixed in space.
Throwback to 2018 when I prototyped the first Lynx headset with ORB-SLAM2 and Leapmotion hand-tracking.
This is experimental and is used by very specific Lynx customers. The default perception algorithm used in Lynx-R1 is the 6DoF algorithm provided by Qualcomm.
Open-source SLAM algorithms are very good, and have been good for the last 8 years or so. You can see from this benchmark that there is a large choice to pick an algorithm with a good range of sensor configurations. The real problem with 6DoF has been the productization of it: including it in the runtime, managing edge-cases, recovery, etc.
At Lynx, we started from the famous ORB-SLAM3 algorithm. Our work started as early as ORB-SLAM2. We took ORB-SLAM3 code and made it compatible for Android, and more precisely Android running with a Qualcomm chipset.
The code is released with GPLv3 license, to enable the community to use it but forcing other companies to keep it open-source so we can all benefit from this starting point and the potential follow-ups.
You can build a .so library that will take in input images and output a 6DoF pose. There is a part of our program that uses proprietary Qualcomm-specific instructions to accelerate some computer vision functions. The benefit is that the system is real time, but the inconvenience for now is that these functions are obfuscated behind a wrapper. It is very feasible to build the library for Android still but without this Qualcomm specific functions and replace them with OpenCV-like equivalents.
This version has been optimized to run at 90 fps without IMU input and no concurrence with hand-tracking and default 6DoF, only relying on XR2 Gen 1 hardware. The camera resolution is 640×400 and is hardcoded in the Qualcomm-specific part so if you want a different image resolution, you need to use the library without the specific Qualcomm functions or we can recompile for you.
The Lynx specific code around the lib, with a demo app that can run on Lynx-R1. (github)
You can find the documentation for the projects on our Portal.
This is a first release, and we welcome community feedback on this work. To that end, feel free to communicate with the relevant people from Lynx about your specific demands or recommendations/contributions using the address system-team+6dof@lynx-r.com.
This work was made possible thanks to the extraordinary contribution of one of our engineers Gaston Rouquette you might also know as VoHeLi from our unofficial Lynx Discord, with the help and coordination of the Lynx System team.
This 10 min interview (in French) gives a good picture of Lynx current ambitions and how we were able to overcome the 2023-2024 hardships.
Now we are laser focus on the finish line of our next product, which I’m very excited for.
As a side note, I used Voxtral from Mistral to transcribe the video in a few seconds and spent maybe 3 minutes correcting a few mistakes and adapt the layout. This new model is a phenomenal (cheap, and opensource) tool.
François Sorel: Fondateur et PDG de Lynx. Si vous ne connaissez pas Lynx, Lynx c’est une histoire incroyable que tu nous as raconté plusieurs fois ici dans Tech&Co, passionné de VR, un jour tu t’es dit bah tiens je vais faire mon propre masque et là t’es rentré dans une espèce de spirale de dingue, t’as réussi à faire ton masque, non sans difficulté parce que créer un masque en France, bah pas sans avoir les moyens d’un Meta c’est compliqué, lever de l’argent c’est compliqué. Où est-ce que tu en es dans ta vision en fait de la VR Stan ? Est-ce que ça avance Lynx ?
Stan Larroque: Bah écoute, l’histoire continue, la série Netflix continue, on est toujours là, ça fait six ans en fait maintenant, ça paraît un peu dingue. Et donc on est…
François Sorel: Quel âge tu as déjà ?
Stan Larroque: Là j’ai 31 ans.
François Sorel: 31 ans, voilà. Donc t’as commencé à 25 ans à te dire voilà.
Stan Larroque: C’est ça, en sortie d’école. En sortie d’école. Ça nous rajeunit pas. Mais je suis toujours là, toujours avec l’équipe qui grandit. Et puis on a fait un premier casque qu’on a pu produire. Alors comme tu l’as dit, effectivement, on est au pire endroit au monde pour faire ce qu’on fait. Dans un métier, la VR et le hardware qui sont très particuliers, très difficiles. C’est la complexité d’un smartphone qu’on met sur la tête de quelqu’un d’autre. Cependant, là, on a eu un 2023-2024 très compliqué. On a fini par livrer les derniers casques. D’ailleurs, il y a la dernière centaine de casques du Lynx R1 qui part des locaux là au mois de juillet. Et au moment où tout allait mal en 2024, je me souviens on s’était vu dans ces eaux-là. On cherchait de l’argent, évidemment on n’a pas trouvé.
François Sorel: Alors qu’on t’avait promis, on va pas rentrer dans les détails, mais monts et merveilles.
Stan Larroque: Voilà, j’ai eu des coups très très durs avec des investisseurs de toutes sortes. Peu importe parce que maintenant en fait ça va beaucoup mieux. Coup de tonnerre, les actionnaires avaient déjà commencé à rayer la ligne Lynx de leurs investissements, c’était presque fini. Et contre toute attente, on a signé un partenariat énorme, de plusieurs millions, avec énormément de ressources, avec Google, fin 2024. Et donc ça, ils ne nous ont pas racheté, ils ne sont même pas devenus actionnaires, c’est un partenariat. Et donc on est, parce que tu l’avais annoncé sur le plateau, vous l’avez couvert plusieurs fois, ils sont en train de travailler sur un truc qui s’appelle Android XR. Donc ils ont un super OS, mais ils n’ont pas beaucoup de hardware. Il y a un casque Samsung.
François Sorel: Ce casque Samsung, c’est un peu l’arlésienne. Ça fait un an qu’on en parle.
Stan Larroque: Ils n’en ont pas parlé à leur événement Unpack aujourd’hui. Ce qui sortira d’ici la fin de l’année, on ne sait même pas. Il va sortir. Il faut qu’il sorte. C’est comme le casque Apple. Il faut qu’il sorte. Il va sortir. Après, ça va être probablement… C’est un peu plus unique, mais c’est un casque très haut de gamme, très premium. C’est peut-être pas ce que les gens ont envie d’acheter ou de dépenser par rapport à la valeur que ça apporte. Nous, on est sur un type de produit complètement différent, avec un pricing complètement différent. Je ne peux pas trop en dévoiler encore, mais par contre, je vais en Asie donner les touches finales sur le device fin juillet. Et en décembre, lors d’un événement à New York, on va annoncer notre V2.
François Sorel: C’est incroyable, ça sera avec Google.
Stan Larroque: Et donc, c’est avec Google, on est un des premiers partenaires Android XR.
François Sorel: C’est-à-dire que Google se sert de ton écrin technologique pour présenter Android XR.
Stan Larroque: En fait, ils sont venus nous voir au moment où tout allait mal, ils sont venus nous voir en disant en fait bonjour, vous êtes une des meilleures sociétés de conception de casques, on aimerait beaucoup travailler avec vous. Donc j’en revenais pas. Et en fait, ils ont communiqué là-dessus, vous pouvez chercher, c’est sur internet. Nous, on n’a pas encore trop communiqué là-dessus parce qu’on attend surtout notre casque pour le montrer et en être très fiers. Mais ils ont signé avec Samsung, ils ont signé avec Sony, ils ont signé avec Xreal, qui est une société chinoise qui fait des lunettes connectées, et ils ont signé avec Lynx. C’est quand même marrant.
François Sorel: C’est la classe.
Stan Larroque: C’est la classe, ça fait du bien. Après, ça reste toujours aussi dur. Et puis les enjeux deviennent beaucoup plus…
François Sorel: Ça t’ouvre des portes d’avoir ce partenariat avec Google?
Stan Larroque: C’est énorme. Pour concevoir ton futur casque qui sort à la fin de l’année. Alors je peux teaser un peu, mais en fait, par rapport aux gens qui ont regardé notre premier casque, le Lynx R1, on a des ressources beaucoup plus conséquentes pour la conception. Et donc, on a accès grâce à Google, déjà, à des ressources financières qu’on n’avait pas forcément avant. Donc ça me permet de bien staffer l’équipe et leur donner les ressources pour avancer. Mais on a des ressources industrielles et on a des équipes chez Google qui nous aident à trouver les bons composants, à sourcer le meilleur plastique, la meilleure batterie. Donc le produit qu’on fait, il est spectaculaire. Mais moi-même, à mon échelle, je suis ravi, je suis époustouflé par ce que les équipes font. Et j’ai hâte, du coup, à la fin de l’année, de vous le montrer.
François Sorel: C’est quoi la claque technologique qui arrive là ? Parce qu’évidemment, tout ça bouge perpétuellement, ça va très très vite. Qu’est-ce qui a le plus progressé en fait ces derniers mois qui t’a le plus impressionné ? C’est quoi ? C’est l’optique ?
Stan Larroque: C’est les displays, de manière générale, les écrans. Les écrans, parce qu’on est en lien avec TCL, BOE, Sharp, les gens qui fabriquent les dalles en fait, que ce soit des télés ou des tout petits écrans que vous mettez dans vos montres ou les casques. On prend une claque et on sent que Apple Vision Pro l’avait montré avec un écran incroyable qui coûtait une fortune avec Sony. 4K par 4K par œil.
François Sorel: C’est Sony qui faisait cet écran.
Stan Larroque: Il y a d’autres écrans un peu clones qui arrivent avec d’autres marques. Les prix baissent et la qualité ne fait que monter. Et donc, ce qui peut décevoir un peu dans la VR, c’est peut-être qu’on n’a pas encore la résolution de l’œil humain, qu’on n’est pas… qui manque à une certaine immersion. Et aussi bien dans l’optique que les displays, je suis très très enthousiaste pour les prochaines générations de produits sur lesquelles nous aussi on travaille du coup.
François Sorel: Cela dit, Stan, est-ce que t’as pas misé sur le mauvais cheval ? Est-ce qu’on se rend pas compte aujourd’hui que finalement, le produit bankable, c’est la lunette connectée ? Quand on voit ce qui se passe avec Essilor Luxottica, Meta qui investit 3 milliards, les Ray-Ban Meta qui se sont vendus comme des petits pains, on sait qu’Apple a des projets là-dessus, même Android XR sera compatible avec des lunettes connectées. Est-ce que c’est pas le produit qu’il faut peut-être créer, la paire de lunettes connectées, avec un écran qui apparaîtrait en surimpression, plutôt qu’un masque qui est malgré tout beaucoup plus, et on s’en rend compte, c’est très immersif, mais malgré tout en société c’est compliqué un masque.
Stan Larroque: Alors, plusieurs choses. Déjà, on va se dire les choses. Quand tu sais faire un casque, c’est pas loin des mêmes technos que les lunettes. Et nous, en R&D, en interne chez Lynx, on fait plus que regarder ce segment de lunettes. Je ne vais pas en dire plus ce soir, mais pour nous, c’est encore deux familles quand même très différentes. Les lunettes qui sont un succès commercial pour Meta et pour Essilor, en fait, c’est un succès commercial, c’est pas forcément un succès économique. Meta perd de l’argent encore à chaque lunette vendue. Donc c’est encore… Ils en ont vendu 2 millions, tu vois. Ils en ont vendu 2 millions, mais c’est très bien, mais c’est comme leur casque. Le Quest 2, ils en ont vendu 15 millions. Ils ont perdu de l’argent à chaque casque vendu. Donc tu vois, c’est un peu un marché qui est créé, pas de toute pièce, mais qui est encore un peu artificiel. Ça vient, c’est sûr, ça va être un bon pari, ça va faire partie de notre quotidien. On voit les deux premiers millions avec Meta Ray-Ban et puis Oakley et puis d’autres marques qui vont être annoncées dans pas trop longtemps. Mais pour nous, c’est encore des expériences différentes. Les lunettes actuellement n’ont même pas encore de display. C’est-à-dire que c’est une caméra, c’est une GoPro. Mais ça va arriver. Je dirais l’écran dans le verre de la paire de lunettes, c’est une question de mois maintenant. Ça va arriver, Google, Apple, Meta, Meta en tête.
François Sorel: Avec Céleste, je crois. Le nom de code, c’est Céleste, de leur paire de lunettes qui devrait arriver très vite.
Stan Larroque: Effectivement, il y a des choses qui se préparent. Cela étant, quand les displays seront dedans, les lunettes vont coûter un peu plus cher. Le marché va devoir trouver son offre. Nous, on attend un petit peu en tant que start-up. Déjà, on a notre super produit et on va bien le soigner. Et on est surtout en B2B. Et puis avec Google, on va essayer le B2C et puis on verra. Et en attendant, ces gros acteurs vont faire les investissements, vont faire les paris marketing et si tu veux de déploiement en centaines de millions voire même en milliards pour Meta. Et puis nous, on verra si on y va ensuite. Mais c’est pas à nous, petite start-up, de jeter là-dedans tout de suite. On va regarder un petit peu parce qu’on sait ce que ça coûte. Et avant de se faire plumer, on va regarder ce qui marche et ce qui marche pas. Ce que les gros sont en train de faire actuellement. Parce qu’on voit que la Vision Pro, bon, c’est pas un super succès, quoi. Alors, c’est pas un super succès, c’est clair, mais à cause de quoi ? C’est à cause de son prix. Le device en lui-même est extraordinaire. Les casques, en fait, ont toute leur utilité, que ce soit pour le jeu vidéo, mais pour les applications professionnelles, ils vont pas pour autant disparaître face aux lunettes. Alors, peut-être qu’un jour, ça va converger. Il y aura une convergence dans 10 ans, peut-être. On sera tous les deux beaucoup plus vieux, je pense. Malheureusement, c’est pas pour tout de suite. Ça va rester deux familles encore. Ça va rester deux familles. Donc nous, on regarde, on a une offre sur les casques, et je suis d’accord avec toi, pour la société, ça reste encore une brique qu’on met dans les yeux, tu vas pas voir quelqu’un dans la rue avec, alors que des lunettes, quand elles ont plus de batterie, ça reste des lunettes, et ça reste accepté depuis longtemps.
François Sorel: En tout cas, ça fait plaisir de voir que, un, tu te portes bien, que Lynx se porte bien, et qu’il y a un beau projet d’ici la fin de l’année, tu viendras nous en parler avant tout le monde.
Stan Larroque: Ah bah bien sûr ! Forcément ! Bien sûr ! Un produit français comme ça, oui, bien sûr ! C’est clair !
François Sorel: Et en tout cas, bravo pour ta résilience, parce qu’on s’en rend compte, c’est pas facile de fabriquer du hardware en France et en Europe. Merci beaucoup Stan ! Stan Larroque, fondateur et PDG de Lynx.
This post is for any person in AR/VR/drones and beyond who want to quickly prototype with stereo cameras.
Our StereoCam prototyping platform
At Lynx, we are big on passthrough for Mixed Reality and thus we always had a need to test various setup of stereo cameras. We even built a passthrough MR headset with 140dB+ HDR cameras (probably not the HDR you think about).
In order to test various lenses and sensors when tinkering future HMD configurations, I built as a weekend project a prototyping platform for the team where the goal was to be as simple and effective as possible to have quick results.
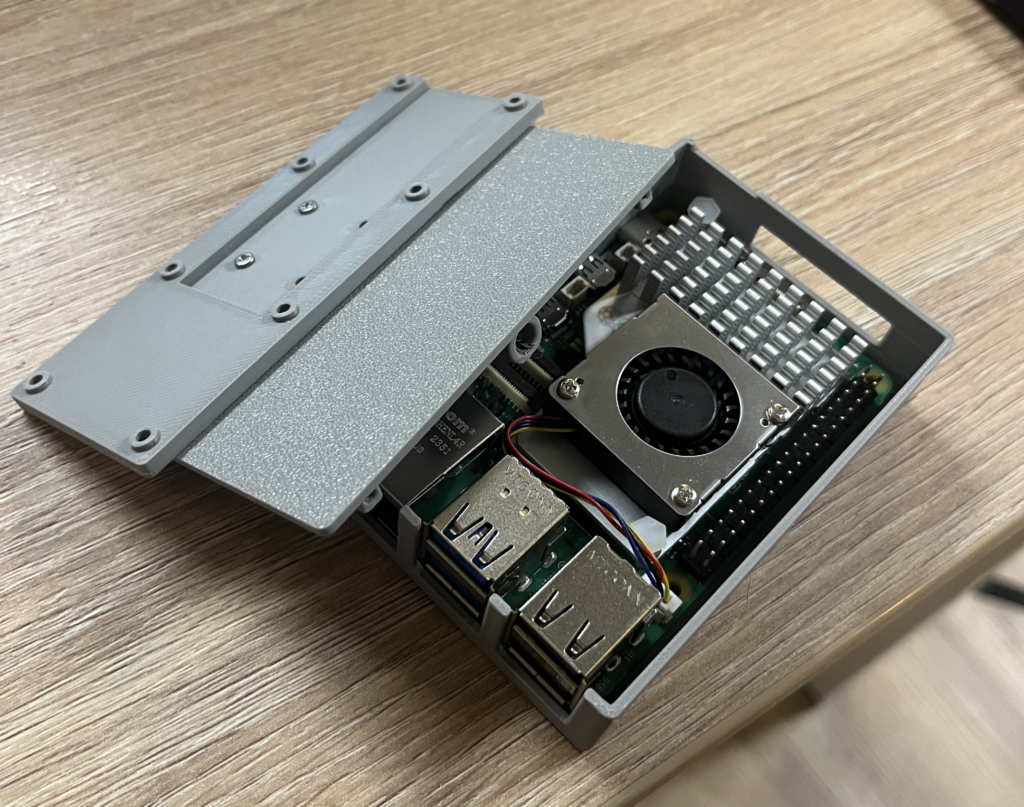
The result is a platform built on top of the latest Raspberry Pi 5. The Raspberry Pi 5 has 2 dedicated MIPI ports, and all the bells and whistles you can expect from a small yet powerful ARM computer. There is even a 16Go RAM version now, pretty cool.
What you’ll need to assemble this:
The casing is separated in 3 volumes (CamHolder, Case, Lid). You can 3D print these with standard PLA very easily.
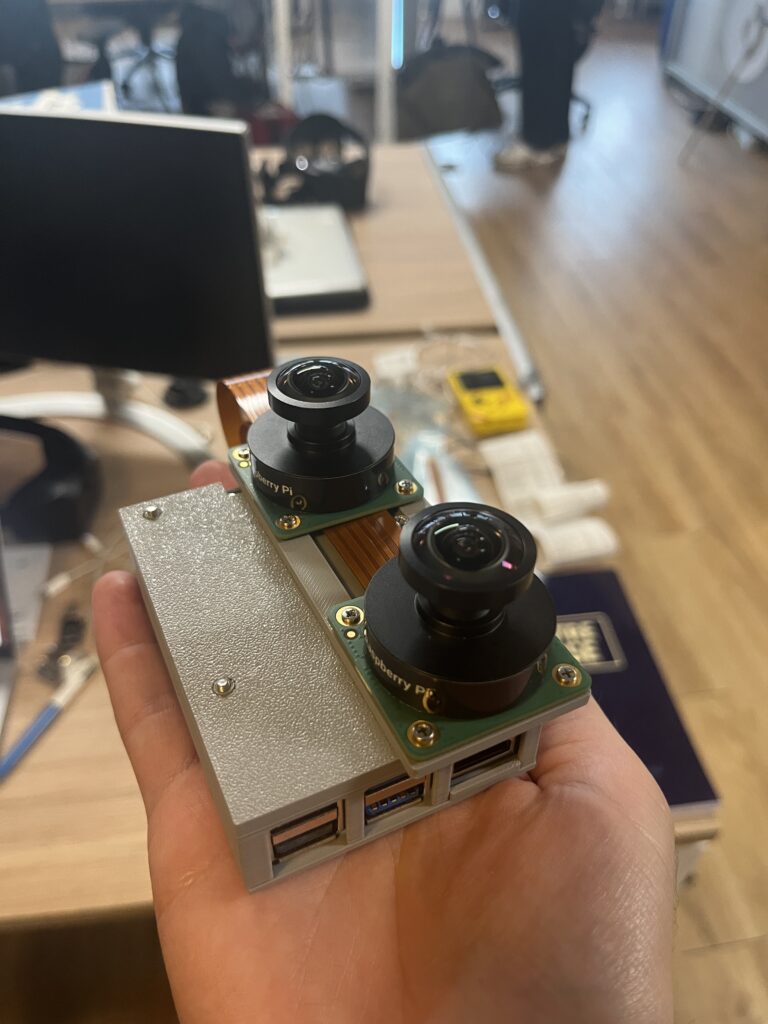
The CamHolder was designed to hold the High Quality Camera from Raspberry Pi. It is a camera module based on a high-res Sony IMX477 sensor. So you can add two of these to the BOM.
The case is designed to hold the Raspberry Pi 5 and its active cooling add-on. If you’re just streaming the cameras over the network to do processing somewhere else, then the whole system should only consume 5-6W, which could be fine without a cooler. Otherwise the active cooler is greatly encouraged.
The case supports all RPi interfaces and its active cooler.
You also need to pick the right lens for your camera. Here is a vendor with a conveniant tool to pick the right FOV based on your resolution requirements.
In Lynx use-case, we dump the RAW frames over the network so we can process them later and on a more powerful computer. We use the Raspberry Pi strictly as a “networked capture card”. The board is connected over Ethernet and we can start streaming the cameras with simple commands thanks to the Raspberry Pi incredible software support for cameras. You should find there your preferred ffmpeg/streaming command lines and if you don’t, you can always dig deeper with libcamera.
Now you have in your hands a very capable stereo camera setup that can do a little bit off onboard processing (not any heavy AI stuff, but OpenCV distortion correction etc is largely feasible). You could even mount it as a payload on a drone and do some cool stereo FPV!
Finally, Google went public with Android XR, after years of working on this new paradigm for the Android ecosystem.
All standalone XR headsets on the market are running currently with their own customized version of AOSP, the open-source part of what people know as “Android”. On top of that, Google just released developer tools, optimizations, perception algorithms and various other software solutions all dedicated to XR. Which I believe is great news for the overall XR market.
Below is a Road To VR article showcasing some projects who were onboarded with Android XR. Lynx is very much part of this group.
Ziad Asghar, Qualcomm SVP of XR during the Google announcement event in NYC.
The announcement (video here) was centered mostly around the high-end MR Samsung headset. I have to say I was quite amazed by the demo and the device itself. Think of it as the Vision Pro but without the front display and with a more rigid strap. The passthrough was pleasant, mostly because of the low-latency of the micro-oleds panels (compared to a LCD display, they don’t need to wait for the full frame to be rendered to display an image). The MTF of the lenses was quite low in periphery for a pancake lens, but the units they were showing to the press are “early units” and some changes are to be expected.
Now for Lynx, it’s great to be able to talk a bit more about this collaboration with Google and Qualcomm. We are adopting Android XR as an OS compatible with our future headsets. The Lynx-R1 will not be compatible with AXR, but I expect all our future products to be AXR-compatible.
The hardware team is working hard on a new product, and you will hear more later in 2025. The software team is still doing R&D and OS work on the side of our AXR integration, for specific customers like in Defense or the medical field, and for some users who will still want something different.
Lynx is basically doing in XR the opposite of Blackberry in the mobile market. Blackberry was killed by the iPhone, but it was also mostly killed by refusing to adopt Android and thus lacked an ecosystem on the long-run. On our end, we are aligning Lynx with a great partner and future ecosystem like Android XR, while also having our own solution for some specific needs.
Edit (21/12/24): for those of you who understand French, here is an interview I gave on French television from New York reacting to the Android XR event.
Tomorrow, exciting news will occur for everyone in the AR/VR (still small) world. Lynx is involved and some pieces of something we’ve been working on for a few months will be revealed.
I can’t talk about anything that will occur tomorrow or the partners involved, but I expect a round of tech news to cover it extensively.
No matter what will happen and what you can learn/speculate from it, these are my words:
Lynx is still committed to the same mission: unlock the best Mixed Reality experiences with amazing devices and OS-level integration for spatial computing.
We are not acquired, nor did a new fundraising. The team is still in place, and still working on exciting new projects and supporting the existing Lynx-R1.
With the latest hardware, optics, and perception sensors and algorithms available now, Mixed Reality is at a level I could only dream about when I started Lynx.
There are more software engineers working at Lynx than hardware engineers (approx. 2/3 SW, 1/3 HW), and they are still working on our OS based on AOSP, from drivers and kernel patches all the way up to the application layer and OpenXR SDK.
For the R1, we are shipping now the last hundreds of devices going to our community (you should see the shipping emails before the end of this week), and will refund the few who asked, as previously declared. We needed a bit more time than anticipated after this summer as the company faced some challenges in 2023 and 2024.
Now for what is coming ahead, the team and I can only contain our excitement for now, but we believe Lynx has now passed a crucial inflection point, both in resources/engineering available and means to really build in quality and quantity at the level of our initial ambition. Please remember that our total budget for the last 4 years is approximately 4 hours of budget at Meta (1B$/month, divided by 720 hours was our yearly burn rate lol).
I can’t wait to share more early next week with you all. Expect a longer blog post.
Stan
_________
Unrelated note: I’m using this post to also signal that I probably won’t be posting on Twitter/X anymore, I generally don’t use social media and grew tired of it all, and I’ll just use this website more if I need to share things.
Unrelated note for the French here (no subtitles available for now): I talked about AR/VR in this video last month, mainly reacting to Meta Orion.
From left to right, Hugo Artarit, Laurent Chabin, Stan Larroque, Didier Lasne, Corentin Lefebvre, Etienne Denoly
As I’m preparing a Lynx press release for Monday, we took some pictures at the office.
This is the original hardware team at Lynx that brought the Lynx R-1 to life.
From left to right:
Hugo Artarit, industrial designer
Laurent Chabin, electrical engineer
Stan Larroque, group leader
Didier Lasne, mechanical engineer
Corentin Lefebvre, optical engineer
Etienne Denoly, industrial designer
Of course, not in the picture are people working at Compal, Qualcomm, Limbak and Ultraleap that helped on the work related to the hardware at different points in the development.
I’m saving this photo here because this is probably the last time we’ll work together in this setup because Lynx is growing fast and we’re hiring a lot, and I’m very proud that we achieved with such low resources.
I’ll do another photo with the software team of course!
Here is the photo of the full Lynx team that created Lynx R-1:
Lynx Team November 2021 in the Paris Office. Left to right: Jean-Marie Vaidie, Didier Lasne, Cedric Morel Francoz, Marc Piuzzi, Etienne Denoly, Hugo Artarit, Laurent Chabin, Stephane Amoa, Stan Larroque, Guillaume Le Fer, Chouki Hadri, Geoffrey Marhuenda. Missing in the picture: Corentin Lefebvre, Guillaume Chevalier.
This video clip is the first visual demo of my Mixed Reality system, it was not named Lynx, and it wasn’t even named at all! It was featuring a simple helicopter model that land on a surface in front of you.
The viewer was an Oculus DK2 and the program was running in Javascript thanks to WebVR on Firefox. There already was two cameras for correct stereoscopic view, fetched with the getUserMedia API.
It’s funny because at this time, it feels like I opted for the worst stack for the proof-of-concept: it was running on a Mac and in a browser, the whole thing written in javascript. The definition of the cameras was awful, no distortion was corrected, it was all fixed with duct tape and cardboard.
But it worked! It was in September 2016, I still have the source code. And I’m really proud of the version we have today.