This post is for any person in AR/VR/drones and beyond who want to quickly prototype with stereo cameras.

At Lynx, we are big on passthrough for Mixed Reality and thus we always had a need to test various setup of stereo cameras. We even built a passthrough MR headset with 140dB+ HDR cameras (probably not the HDR you think about).
In order to test various lenses and sensors when tinkering future HMD configurations, I built as a weekend project a prototyping platform for the team where the goal was to be as simple and effective as possible to have quick results.
The result is a platform built on top of the latest Raspberry Pi 5. The Raspberry Pi 5 has 2 dedicated MIPI ports, and all the bells and whistles you can expect from a small yet powerful ARM computer. There is even a 16Go RAM version now, pretty cool.
What you’ll need to assemble this:
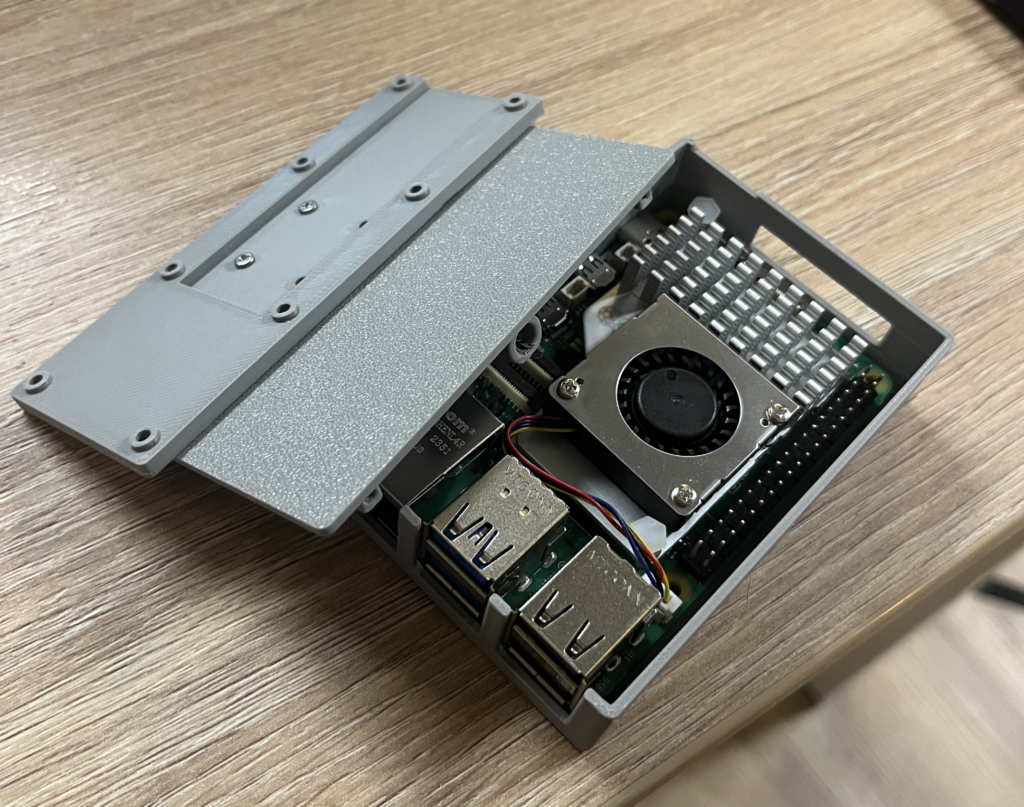
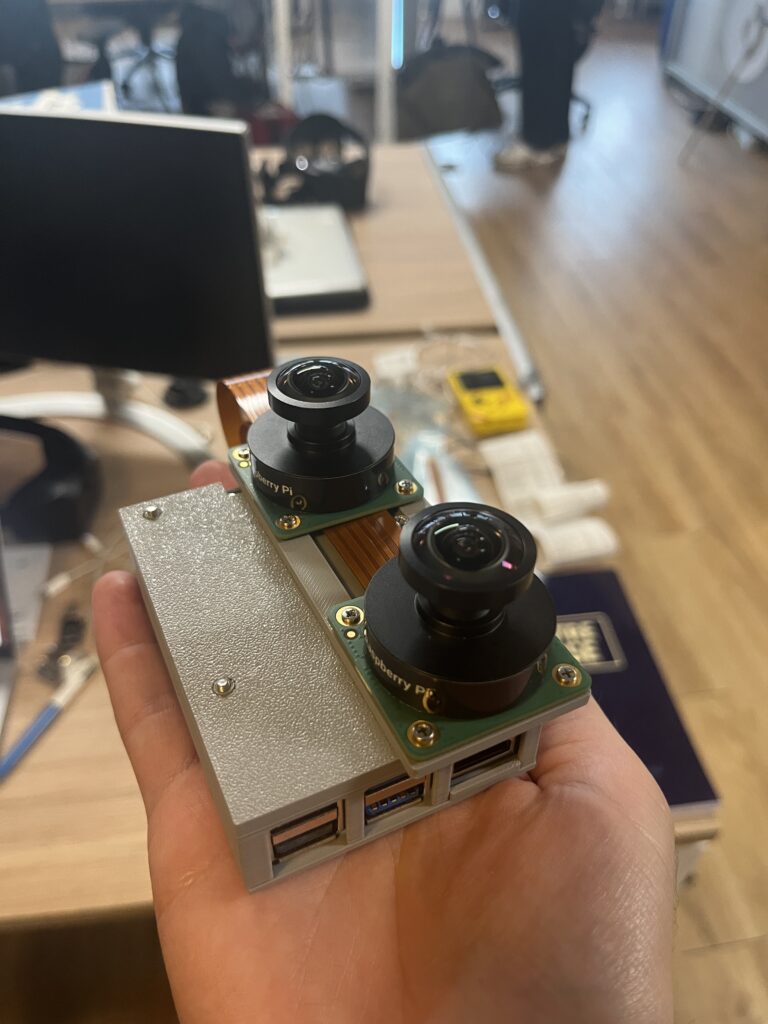
The casing is separated in 3 volumes (CamHolder, Case, Lid). You can 3D print these with standard PLA very easily.
The CamHolder was designed to hold the High Quality Camera from Raspberry Pi. It is a camera module based on a high-res Sony IMX477 sensor. So you can add two of these to the BOM.
The case is designed to hold the Raspberry Pi 5 and its active cooling add-on. If you’re just streaming the cameras over the network to do processing somewhere else, then the whole system should only consume 5-6W, which could be fine without a cooler. Otherwise the active cooler is greatly encouraged.
To connect the MIPI cameras to the Raspberry Pi, you’ll need this kind of FPC: https://www.digikey.fr/fr/products/detail/raspberry-pi/SC1128/21658272. It also exists in 300mm and 500mm length.
You also need to pick the right lens for your camera. Here is a vendor with a conveniant tool to pick the right FOV based on your resolution requirements.
In Lynx use-case, we dump the RAW frames over the network so we can process them later and on a more powerful computer. We use the Raspberry Pi strictly as a “networked capture card”. The board is connected over Ethernet and we can start streaming the cameras with simple commands thanks to the Raspberry Pi incredible software support for cameras. You should find there your preferred ffmpeg/streaming command lines and if you don’t, you can always dig deeper with libcamera.
Now you have in your hands a very capable stereo camera setup that can do a little bit off onboard processing (not any heavy AI stuff, but OpenCV distortion correction etc is largely feasible). You could even mount it as a payload on a drone and do some cool stereo FPV!
_______________
Subscribe to receive the latest articles.
Leave a Reply
You must be logged in to post a comment.